Control Methods of BLDC Motor
Brushless DC motor (BLDC) replaces the mechanical commutator with electronic commutator, just because of the electronic commutator, the BLDC motor needs a controller to drive the circuit. ATO BLDC motor not only has a speed regulation performance as the DC motor, but also has the advantages of simple structure, no commutation spark, reliable operation and easy maintenance as the AC motor, so it’s widely used in industrial equipment, instrumentation, household appliances, robots, medical equipment and other fields. The commutation circuit of BLDC motor consists of two indispensable parts: drive and control. Particularly, the two parts are integrated into a single ASIC for low power circuit. At present, there are 3 control methods for BLDC motor: FOC (known as vector frequency control, magnetic-field vector directional control), square-wave control (also known as trapezoidal wave control, 120° control, 6-step commutation control ) and sine wave control. What are the advantages and disadvantages of these 3 control methods?
At present, there are 3 control methods for BLDC motor: FOC (known as vector frequency control, magnetic-field vector directional control), square-wave control (also known as trapezoidal wave control, 120° control, 6-step commutation control ) and sine wave control. What are the advantages and disadvantages of these 3 control methods?
Square-wave control
Square-wave control uses Hall sensor or sensorless estimation algorithm to obtain the position of the motor rotor, and then commutates six times in the 360° electrical cycle according to the position of the rotor (commutate per 60°). The motor outputs a specific direction force at each commutation position, so it can be said that positional accuracy of the square-wave control is electrical 60°. In this control method, the phase current waveform of the motor approaches the square wave, so it is called square-wave control.
Advantage of square-wave control include: simple control algorithm, low hardware cost, and higher motor speed can be obtained by using ordinary controller. Disadvantage of square-wave control include: large torque ripple, a certain current noise, efficiency is not up to the maximum. Square-wave control is suitable for occasions where motor rotation performance is not very high.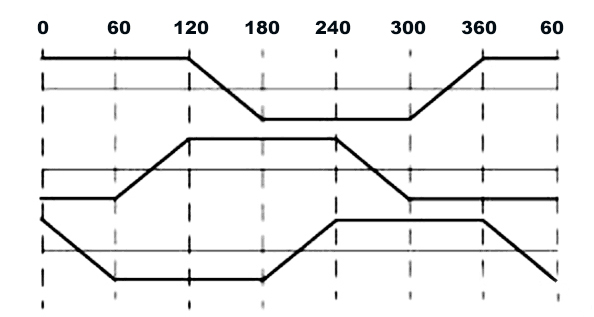 Sine wave control
Sine wave control
Sine wave control uses the SVPWM wave and outputs the three-phase sine-wave voltage, corresponding current is sinusoidal current. In such a control mode, there’s no concept of commutation as the square-wave control, nor it thinks that infinite commutations have been occurred in an electric cycle. Obviously, sine wave control has smaller torque ripple and less current harmonics than the square-wave control, its control is more "exquisite". However, it has higher performance requirements for controller than the square-wave control, the motor efficiency can not be maximum.
FOC control
Sine wave control realizes the control of voltage vector and indirectly realizes the current control, but it can not control the direction of current. FOC control can be regarded as an upgraded sine wave control, it realizes the control of current vector, namely realizing the vector control of motor’s stator magnetic field.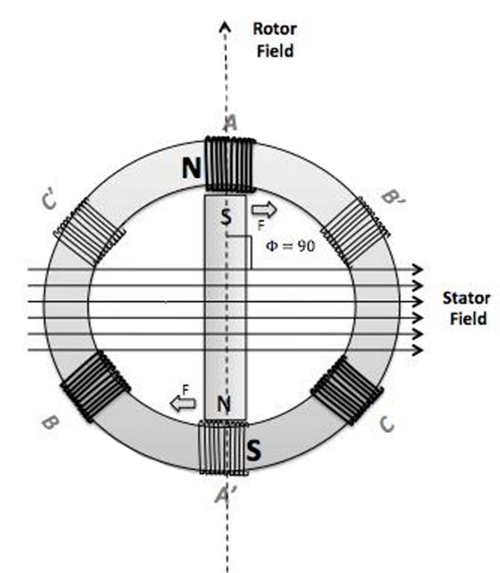
As FOC control controls the direction of motor’s stator magnetic field, it can keep the motor’s stator magnetic field and the rotor magnetic field at 90° all the time, thus achieving a maximum torque output under a certain current. Advantages of FOC control include: small torque ripple, high efficiency, low noise and fast dynamic response. Disadvantages include: high hardware cost, higher requirement for the controller performance, and motor parameters need to be matched. Due to its distinct advantages, FOC control has gradually replaced the traditional control mode in many applications and won great favor in motion control field.

What does that even mean? That "rotation performance is not very high"? Care to elaborate on this?
You also should notice that BLDC is already a very advance DC motor already compare to other DC motor, so to even use this, no matter how you control it by FOC or square-wave or sin-wave, will give you really really nice result. And if you even want it to be highter, you can start to care about these comtrol methods.