How to Unlock the Timing Lock of a Servo Drive?
Servo motor driver servo lock control
Servo lock is essentially a braking mode. When the servo motor driver selects the speed control mode, closed-loop position control cannot be performed. Therefore, the stop position of the servo motor is random, and there is no holding torque after stopping. At this time, If there is an external force (such as gravity) on the load, it may cause the servo motor to move and deviate from the stop point after it stops.
Using the servo lock function, when the servo motor driver selects the speed control mode, a temporary position closed loop can be established on the servo motor driver through the Dl signal, and the servo motor can be kept in a fixed position through the closed loop position.
Servo lock function is valid when parameter Pn000.1=A. For example, the servo motor driver parameter Pn50A.O=0, the DI/DO function is the factory default setting, and the input terminal of the servo lock signal ZCLAMP is CNI-41; the function can be superimposed on the analog input: human-controlled speed control mode, If the setting parameter Pn50A.O=1, the input terminal of the ZCLAM signal can be freely allocated through the setting of the parameter Pn50D.O.
The servo lock function can be used in various control modes of parameters Pn000.1=0.3~7, 9, A, but when the servo lock function is valid, it must be ensured that the servo motor driver has been switched to the speed control mode.
When the servo motor driver works in the speed control mode, as long as the ZCLAMP signal is ON, if the servo motor driver is in the stopped state, it will directly switch to the temporary closed-loop position control state. If the servo motor driver is running, the speed reference input will be cut off immediately. The motor decelerates and stops. Once the speed of the servo motor decreases to within the speed set by parameter Pn501, the servo motor driver switches to the temporary closed-loop position control state (servo lock). Temporary closed-loop position control can stop the servo motor and keep it at the zero position of the encoder. The holding torque after positioning can be adjusted through the position loop gain parameters Pn102/Pn104.
How to unlock the timing lock of a servo drive?
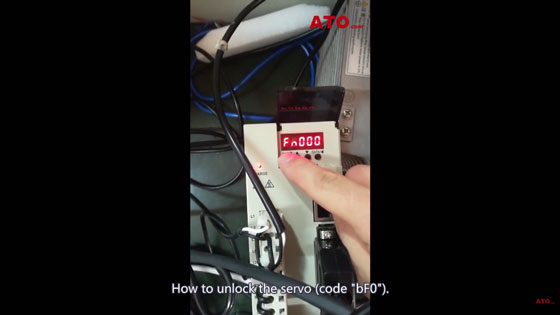
Fn307→P1n, input thepreviously set password.

Confirm-password.

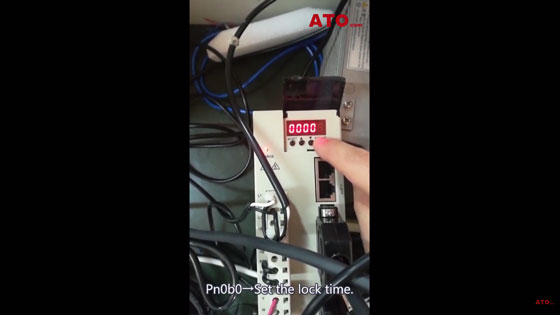
Pn0b0-→Set the lock time.
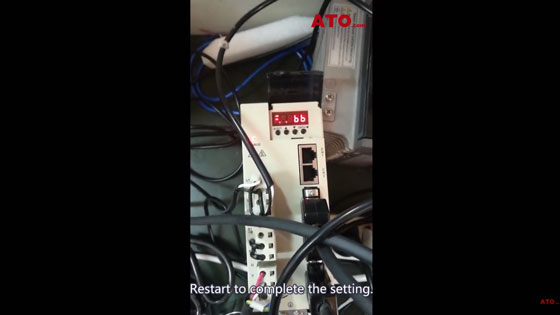
Restart to complete the setting.
ATO has single-phase 220V/240V and three-phase 220V/380V servo motors with power from 50W to 7.5kW. For more detailed servo drive unlocking device video please see:
