Stepper Motor Driver Working Principle
The Stepper motor driver is an important part of controlling the rotation of the stepper motor, which converts the control signal into a current signal to drive the stepper motor to rotate according to the precise angle. Stepper motors are widely used in many fields, such as printers, CNC machine tools, robots, etc. ATO.com will introduce the working principle of stepper motor driver in detail.
Overview
A stepper motor is a motor that converts electrical pulse signals into mechanical rotation. It rotates at a fixed step angle. For every pulse signal received, the motor rotates by one step angle, so the position and speed of the motor can be precisely controlled. A stepper motor usually consists of a stator, a rotor, and a driver circuit.
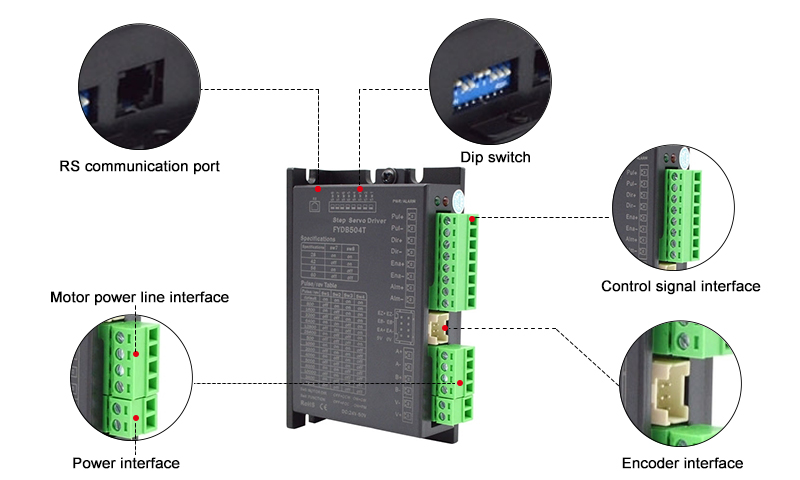
Components of a Stepper Motor Driver
The stepper motor driver consists of two parts: the control logic circuit and the power drive circuit. The control logic circuit receives the command signals sent by the upper control system and converts them into corresponding pulse signals, while the power driver circuit is responsible for converting the pulse signals into current signals to drive the stepper motor.
Stepper Motor Driving Principle
The stepper motor drive principle is based on electromagnetism and pulse control technology. A stepper motor usually consists of multiple windings, each of which is called a phase, and there is a certain phase difference between the phases, usually 90 degrees. Depending on the number of phases in the motor, stepper motors can be categorized into different types, such as two-phase, three-phase, five-phase, etc.
Control Logic Circuit
Control logic circuits receive external control signals, usually digital, such as instructions from a microprocessor or controller. These instructions can specify parameters such as the direction of rotation, stepping angle, speed, etc. of the motor.
The control logic circuit generates a corresponding pulse train based on the received command signals. For an N-phase stepper motor, each phase of the winding corresponds to a control signal, and the control logic circuit switches these signals in a certain order according to the input signal to drive the motor rotation.
Power Driver Circuit
Pulse signals are generated by the control logic circuit, but they are not sufficient to drive the stepper motor directly because the stepper motor requires a high current to exert sufficient torque. The task of the power driver circuit is to convert the low-current, low-voltage pulse signals into a current large enough to drive the stepper motor. Commonly used power drive circuits include dual H-bridge circuits and MOSFET amplifier circuits. These circuits can establish the correct current path between the windings according to the pulse signal, thus enabling the stepper motor to rotate smoothly.
Current Control
Stepper motors are usually composed of multiple coils, each of which requires a current to activate. One of the main tasks of a stepper motor driver is to control the current through these coils. It does this by converting the voltage from an external power supply into the appropriate current and distributing it to the appropriate coils in different modes of operation (e.g., full-step, half-step, etc.).
Pulse Input
The stepper motor driver accepts pulse input signals from the control system (e.g. microcontroller, PLC, etc.). Each pulse signal corresponds to a stepping angle of the stepper motor, typically 1.8 or 0.9 degrees (full-step mode), or less (half-step mode).
Direction Control
In addition to the pulse input, the stepper motor driver receives a direction control signal. This signal determines whether the stepper motor rotates clockwise or counterclockwise. Direction control can be realized using a binary signal (e.g. high level for clockwise, low level for counterclockwise).
Current Subdivision
To improve the resolution and smoothness of stepper motors, stepper motor drivers usually support the current subdivision. This means that each pulse can be divided into smaller step angles, resulting in smoother stepper motor rotation. This is particularly common in half-step mode, where each pulse causes the motor to rotate by half a step angle.
Drive Output
Based on the received pulse and direction signals, the stepper motor driver controls the proper coil activation sequence and current level. Depending on the type of motor (bipolar or quadrupolar), the stepper motor driver activates the coils in sequence according to a predetermined phase sequence, which causes the stepper motor to rotate at the set step angle and direction.
Protection Features
Some stepper motor drivers are also equipped with protection features to prevent problems such as excessive current and overheating. These features ensure the safe operation of the stepper motor system and prevent damage to the motor or driver.
Overall, stepper motor drivers work by converting pulses and direction signals from a control system into appropriate current and voltage signals to drive a stepper motor to rotate at a specified step angle and direction. Different types of stepper motors and applications may require different types of stepper motor drivers for optimal performance and control.
