What is a Hybrid Stepper Motor?
Hybrid stepper motor is a stepper motor designed by combining the advantages of permanent magnet and reactive. It is divided into 2 phase, 3 phase and 5 phase. The two phase stepping angle is generally 1.8 degrees, the three phase stepping angle is generally 1.2 degrees, and the five phase stepping angle is generally 0.72 degrees.
The rotor of the hybrid stepper motor is magnetic, so the torque generated under the same stator current is larger than that of the reactive stepper motor, and its step angle is usually smaller. Therefore, economical CNC machine tools generally need to use the hybrid stepper motors and stepper motor driver. However, the structure of the hybrid rotor is more complicated, the rotor inertia is large, and its rapidity is lower than that of the reactive stepper motor.
Hybrid stepper motor characteristics
- Large output torque and high speed.

- The hybrid stepper motor will not overheating and has high efficiency.
- The high-speed stop is smooth and fast, the zero-speed oscillation runs smoothly, and the vibration and noise are small.
- Fast response speed, suitable for occasions with frequent start and stop.
Hybrid stepper motor working principle
The structure of the hybrid stepper motor is different from that of the reactive stepper motor. The stator and the rotor of the reactive stepper motor are both integrated, while the stator and the rotor of the hybrid motor are divided into two sections as shown in the figure below. There are also small teeth on the surface.
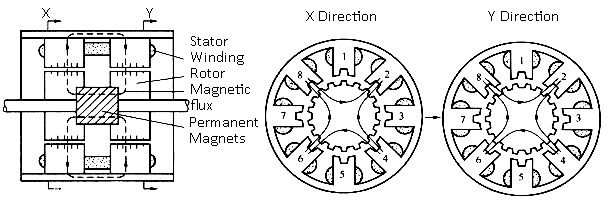
The two slots of the stator are not in place, and the windings are arranged on them. The above shows a 2 phase 4 pole stepper motor, in which 1, 3, 5, and 7 are the magnetic poles of the A-phase winding, and 2, 4, 6, and 8 are the magnetic poles of the B-phase winding. Adjacent pole windings of each phase are wound in opposite directions to produce the closed magnetic circuit shown in the x, y view in the above figure.
The B phase is similar to the A phase. The two tooth slots of the rotor are staggered by half a tooth pitch (see Figure), and the middle is connected by a ring-shaped permanent magnet, and the magnetic poles of the teeth of the two rotors are opposite. According to the same principle of the reactive motor, as long as the motor is energized in the order of A-B-A-B-A or A-B-A-B-A, the stepper motor can continuously rotate counterclockwise or clockwise.
Obviously, all the teeth on the same segment of the rotor piece have the same polarity, while the polarities of the rotor pieces of two different segments are opposite. The biggest difference between the hybrid stepper motor and the reactive stepper motor is that when the magnetized permanent magnetic material is demagnetized, there will be oscillation points and out-of-step regions.
Difference between hybrid stepper motor and reactive stepper motor
- Different structure and material. The hybrid stepper motor has permanent magnetic material inside, so it has self-resistance. That is, there is a certain self-locking force when the motor is not powered on), while the reactive motor has no self-resistance.
- Different running performance. The hybrid stepper motor runs relatively smoothly, the output torque is relatively large, and the running sound is small.
- Different price. The reactive stepper motor is cheaper than the hybrid stepper motor.
