What is Permanent Magnet Synchronous (PMSM) Motor?
Permanent magnet synchronous motor is an AC motor that generates torque by the interaction of the excitation magnetic field supplied by a direct current and the rotating magnetic field of the armature, and rotates at a synchronous speed. It belongs to AC motors, and the stator windings are the same as synchronous motor. Because its rotor rotation speed is the same as the speed of the rotating magnetic field generated by the stator winding, it is called synchronous motor.
Working Principle of PMSM Motor:
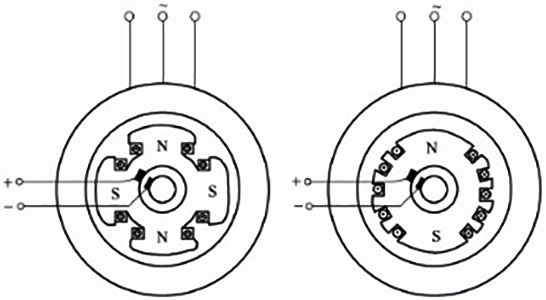
When a permanent magnet synchronous motor is working, three-phase symmetrical current flows into the three-phase windings of the stator, and direct current flows into the excitation winding of the rotor. As three-phase alternating current is passed through the three-phase symmetric winding of the stator, rotating magnetic field will be generated in the air gap. Static magnetic field with a constant polarity is generated when direct current is applied to the rotor field winding. If the number of magnetic pole pairs of the rotor magnetic field is equal to the number of magnetic pole pairs of the stator magnetic field, the rotor magnetic field will rotate synchronously with the stator rotating magnetic field due to the magnetic pulling force of the stator magnetic field.
Synchronous Speed:
When the rotating magnetic field has P pairs of magnetic poles, every time the alternating current changes one circle, the magnetic field will turn 1/P revolution in space. So the synchronous speed n1 is: n1=60f/p
f: f is the frequency of the AC supply in Hz
P: P is the number of pole pairs produced by the stator winding
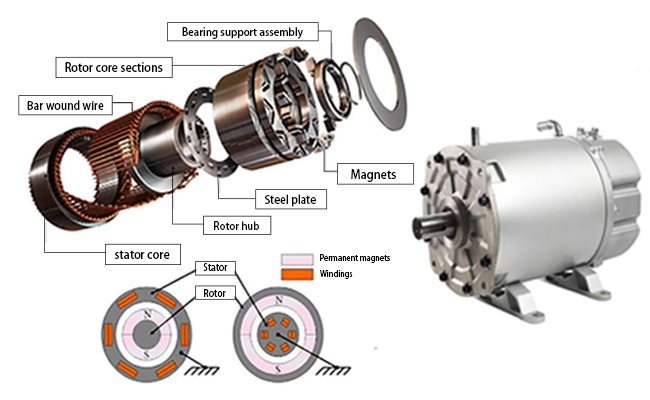
Construction:
Synchronous motors have two structural forms: rotating magnetic pole and rotating armature type. Because the rotating magnetic pole type has the advantages of small rotor weight, simple manufacturing process, small current through brushes and slip rings, large and medium-capacity synchronous motor mostly adopt the rotating magnetic pole structure. According to the shape of the rotor, the rotating magnetic pole type can be divided into salient pole type and hidden pole type. The salient pole type is mostly used in occasions where low speed is required. Its rotor is thick and short, and the air gap is uneven. Hidden pole type is mostly used in the occasions that require high speed. The rotor is thin and long, and the air gap is uniform.
Like other rotating motors, permanent magnet synchronous motors consist of two parts: stator and rotor. The stator of the rotating magnetic pole type synchronous electronic is mainly composed of base, iron core and stator winding. In order to reduce the hysteresis and eddy current loss, the stator core is laminated with thin silicon steel sheets, and the inner surface of the stator core is embedded with spatially symmetrical three-phase windings. Rotor is mainly composed of rotating shaft, slip ring, iron core and rotor winding. In order to take into account the requirements of magnetic permeability and mechanical strength, the rotor core is often forged from high-strength alloy steel. Rotor core is equipped with an excitation winding, and its two outlet ends and two slip rings are respectively connected. For facilitating the start, the surface of the salient-pole rotor magnetic pole is also equipped with guide bars made of brass, and the two end faces of the magnetic poles are respectively connected by copper rings to form an incomplete cage start winding.
Features:
- Conducive to improving the power factor of the grid. Permanent magnet synchronous motors can be operated at a leading power factor by adjusting the excitation current. Large scale equipment such as large blowers, water pumps, ball mills, compressors and rolling mills are often driven by synchronous motors.
- The speed of synchronous motor is completely determined by the frequency of the power supply. When the frequency is constant, the speed of the motor is also certain, and it does not change with the load. This feature is of great significance in certain transmission systems, especially multi-machine synchronous transmission systems, precision speed regulation and constant speed systems.
- Permanent magnet synchronous motor with high operation stability. Synchronous motors generally run under over-excitation, and their overload capacity is greater than that of corresponding asynchronous motors. The torque of asynchronous motor is proportional to the square of the voltage, but the speed of synchronous motor is determined by the product of the voltage and the internal electromotive force generated by the motor’s excitation current, that is, it is only proportional to the first power of the voltage. When the grid voltage suddenly drops to about 80% of the rated value, the asynchronous motor torque often drops to about 64%, and stops running due to the immovable load. However, the torque of the synchronous motor does not drop much, and the stable operation of the motor can be ensured by forcible excitation.
Starting of Synchronous Motor:
Starting the synchronous motor can only produce an average torque at the synchronous speed. If the stator is connected to the power grid immediately and the rotor is excited by DC when starting, the stator rotating magnetic field immediately rotates at a synchronous speed, and the rotor magnetic field is temporarily stationary due to the inertia of the rotor, and the electromagnetic torque generated at this time will be positive or negative. Alternating and its average value is zero, so the motor cannot start by itself. To start a pmsm motor, other methods must be used. There are mainly two methods.
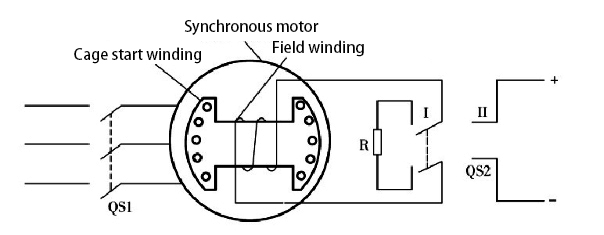
Asynchronous Starting Method
A cage-type starting winding is installed on the pole shoes of the main magnetic pole of the motor. When starting, first short-circuit the excitation winding through a resistor, and then connect the stator winding to the grid. Relying on the asynchronous electromagnetic torque of the start winding to make the motor speed up to close to the synchronous speed, and then passing the excitation current into the excitation winding to establish the main pole magnetic field, the synchronous electromagnetic torque can be used to pull the motor rotor into the synchronous speed.
Auxiliary Motor Starting Method
Usually choose an induction motor with the same number of poles as the synchronous motor (capacity is about 10-15% of the main engine) is used as an auxiliary motor, and the main engine is dragged to a speed close to the synchronous speed. Then switch the power supply to the stator of the main machine, and the excitation current flows into the excitation winding, and the main machine is pulled into the synchronous speed.
