BLDC Motor vs. AC Motor
Different Working Principle
Working Principle of BLDC Motor
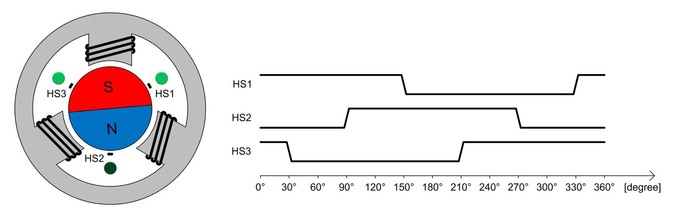
The BLDC motor is mainly composed of the motor body, position sensor, electronic commutation circuit and driver. The motor body is similar in structure to a permanent magnet synchronous motor, but it has neither cage windings nor other starting devices. The stator windings are generally made into multiple phases (three-phase, four-phase, five-phase and so on). The rotor is composed of permanent magnet steel according to a certain number of pole pairs (2p=2, 4...). In a BLDC motor, the armature winding is arranged on the stator, and the permanent magnet poles are arranged on the rotor. The position of the armature winding of each phase of the stator relative to the magnetic field of the permanent magnet of the rotor is sensed by the rotor position sensor electronically or electromagnetically. Moreover, it uses its output signal to drive the corresponding power switch transistor connected with the armature winding through an electronic conversion circuit according to a certain logic program, and commutate the current switch to the corresponding armature winding. With the rotation of the rotor, the rotor position sensor continuously sends out signals, causing the armature winding to be continuously energized in sequence, and the energization state is constantly changed. As a result, the direction of the current flowing in the coil conductor under a certain magnetic pole is always the same, and the rotor keeps running.
 The driver is composed of power electronics and integrated circuits. Its functions include receiving the start, stop and brake signals of the motor to control the start, stop and brake of the motor, receive the signal from the position sensor and the forward and reverse signals to control the on and off of each power tube of the inverter bridge to generate continuous torque, receive speed command and speed feedback signalm to control and adjust the speed, and provide protection and display, etc.
The driver is composed of power electronics and integrated circuits. Its functions include receiving the start, stop and brake signals of the motor to control the start, stop and brake of the motor, receive the signal from the position sensor and the forward and reverse signals to control the on and off of each power tube of the inverter bridge to generate continuous torque, receive speed command and speed feedback signalm to control and adjust the speed, and provide protection and display, etc.
Simply put, by changing the alternating frequency and waveform of the current wave input to the stator coil of the brushless motor, a magnetic field rotating around the geometric axis of the motor can be formed around the winding coil. This magnetic field drives the permanent magnets on the rotor to rotate, and the motor rotates.
Working Principle of Single-phase AC Motor
The single-phase AC motor has only one winding, and its rotor is squirrel cage type. When a single-phase sinusoidal current passes through the stator windings, the motor generates an alternating magnetic field. The strength and direction of this magnetic field change sinusoidally with time, but it is fixed in space, so this magnetic field is also called an alternating pulsating magnetic field. This alternating pulsating magnetic field can be decomposed into two rotating magnetic fields with the same speed and opposite rotation directions. When the rotor is stationary, the two rotating magnetic fields produce two torques of equal magnitude and opposite directions in the rotor. This makes the resultant torque zero, so the motor cannot rotate. When we use external force to rotate the motor in a certain direction (such as clockwise rotation), then the movement of the cutting magnetic field lines between the rotor and the clockwise rotating magnetic field becomes smaller, and the movement of the cutting magnetic field lines between the rotor and the counterclockwise rotating magnetic field becomes larger. As a result, the balance is broken. The total electromagnetic torque produced by the rotor will no longer be zero, and the rotor will rotate in the direction of pushing.
To make the single-phase motor rotate automatically, we can add a starting winding to the stator. If you want to make the start winding and the main winding 90 degrees in space, a suitable capacitor should be connected in series to the start winding so that the current in the main winding is approximately 90 degrees out of phase. This is the so-called principle of phase separation. In this way, two currents that are 90 degrees apart in time will generate a (two-phase) rotating magnetic field in space when passing through two windings that are 90 degrees apart in space. Under the action of this rotating magnetic field, the rotor can start automatically. After starting, when the speed rises to a certain level, the starting winding can be disconnected by means of a centrifugal switch or other automatic control device installed on the rotor. During normal operation, only the main winding works. Therefore, the start winding can be made into a short-time working mode. However, there are many times the start winding is not disconnected. We call this kind of motor a capacitive type. Changing the direction of the motor can be achieved by changing the position of the capacitor in series.
Different Structure
There is a coil in the AC motor. The resistance of this coil is generally not very high, which is around 100 ohms. Taking the phase shift as an example, it is divided into starting winding and operation winding.
The internal structure of the DC brushless motor is mainly composed of the stator and the rotor. In the past, brush motors were used in most cases. There is a carbon brush on the rotor of the brush motor, and there is a Hall sensor on the motor. During the working process, it continuously and alternately contacts with the conversion plate, which generates an alternating electromagnetic field and continues to rotate. However, the later developed and designed DC brushless motors have no carbon brushes and are much smaller than AC motors and DC brushed motors in size, so many industrial equipment now use DC brushless motors.
Different Output Power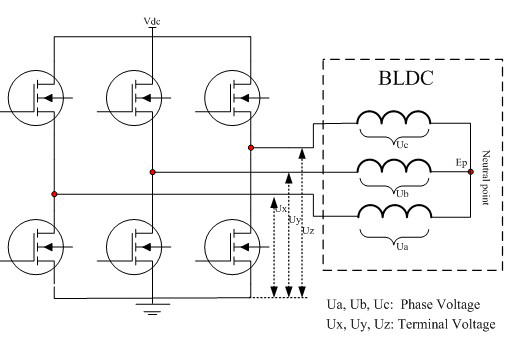
Generally, the power of a bldc motor is smaller than that of an AC motor. Especially the DC brushless motor, but the DC brushless motor overcomes many shortcomings of the DC brushed motor. Therefore, in the current motor market, BLDC motors are more popular than brushed DC motors.
Advantages vs. Disadvantages
AC Motor
Advantages: Simple structure, convenient operation, low manufacturing cost, simple and economical maintenance and repair.
Disadvantages: Low efficiency, inability to work under low voltage, low starting torque, high starting current, difficult speed adjustment, depend on frequency conversion equipment to achieve speed changes.
BLDC Motor
Advantages: High efficiency, long service life, smaller size than AC motors of the same power, large efficient area, high power and torque density, good low voltage characteristics, strong torque overload characteristics, high start-up torque (locked-rotor characteristics), high rpm, convenient speed adjustment, low electromagnetic noise, low starting current, etc. ATO offers brushless DC motors with all of the above advantages, here you can buy 2.5 hp (1.9 kW) brushless DC motor, 10kw high torque brushless DC motor, etc.
Disadvantages: Complex structure and high manufacturing cost.
