How to Drive Servo Motor with PLC?
Before answering this question, we need to know about the use of servo motors, compared to ordinary motors, servo motors are mainly used for precise positioning, so what we usually call control servo is the position control of the servo motor. Servo motors also use the other two working modes, that is, speed control and torque control, but the application is relatively small.
Speed control is generally achieved by inverters, servo motors to do speed control, is generally used for rapid acceleration and deceleration or speed precision control occasions, because relative to the inverter, servo motors can reach thousands of revolutions within a few millimeters, because the servo is closed-loop, the speed is very stable. Torque control is mainly to control the output torque of the servo motor, again because of the fast response of the servo motor. Application of the above two kinds of control, you can treat the servo drive as a frequency converter, generally with analog control.
The most important application of servo motor is still positioning control. Position control has two physical quantities to control, that is, speed and position, to be precise, it is to control how fast the servo motor reaches somewhere and stops exactly.
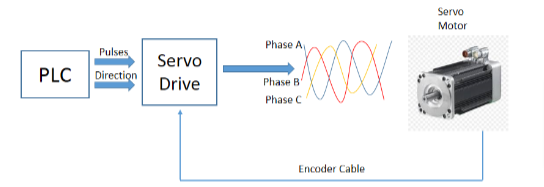
The servo driver controls the distance and speed at which the servo motor runs by the frequency and number of pulses it receives. For example, let's agree that the servo motor will make one revolution every 10,000 pulses. If the PLC sends 10,000 pulses in one minute, then the servo motor goes through one revolution at 1r/min, and if it sends 10,000 pulses in one second, then the servo motor goes through one revolution at 60r/min.
Therefore, the PLC is sent through the control of the pulse to control the servo motor, the physical way to send pulses, that is, the use of PLC transistor output is the most common way, generally low-end PLC using this way. And the middle and high-end PLC is through the communication of the number and frequency of pulses to the servo drive. These two ways are just different channels to achieve the same, the essence is the same.
For the program writing, this is a big difference, the Japanese PLC is the way of instructions, while the European PLC is in the form of function blocks. But the essence is the same, for example, to control the servo to go an absolute positioning, we need to control the output channel of the PLC, the number of pulses, pulse frequency, acceleration and deceleration time, as well as the need to know when the servo drive positioning is complete, whether to hit the limit, etc... No matter what kind of PLC, it is just the control of these physical quantities and the reading of the motion parameters, but different PLC implementation methods are different.
Q: Does a servo motor have to be controlled by a PLC?
A: Not necessarily.
The PLC is never the direct controller of the servo motor. The servo motor is driven by a servo driver or called a servo amplifier. The PLC controls the servo driver by way of PTO (pulse string) or communication (bus, serial port, etc.), and the servo driver then controls the servo motor for motion. In industry, some big companies have their servo drive products. Servo driver and servo motor are used together, and generally, the motor line and encoder line are ready-made products, so you only need to buy them according to the demand. On some less demanding occasions, you can also use a microcontroller to send a signal to the servo driver, this case is generally used a PTO signal. You will see many stepper motor drivers on the market, which are used to control stepper motors and are different from servo motors.
