Servo Motor Control Principle
In the servo motor system, the engine that controls the operation of mechanical components is called servo motor, which is a kind of subsidized motor indirect variable speed device that can control the speed, so that the position of the object and the orientation, state and other output controlled quantities can follow the input target (or a given value) of any change, and the position accuracy of the servo motor is very high, and it can convert the voltage signal into torque and speed to drive the control object.
How does a servo motor control work?
When the servo motor receives 1 pulse, the servo system will be displaced, and it has the function of sending pulses itself, so when the servo motor rotates every angle it will send out the corresponding number of pulses.
This is called closed loop, so that the system will know how many pulses are sent to the servo motor and how many pulses are received in total. In this way, the motor can be precisely controlled and more accurate positioning can be achieved.
The servo motor can control the rotational position of the drive shaft to a specific angle using an input signal. The servo system is controlled by a pulse width modulation (PWM) signal through the control line. Minimum pulse widths and repetition rates exist. Servo motors can usually only rotate 90° in both directions, i.e. a total of 180°. For example, when operating with DC power, shaft position control would use PWM to rotate the drive shaft in either a clockwise or counterclockwise direction, depending on the pulse width of the signal, when using a 1.5ms pulse, the shaft is set to a 90° position (i.e., the middle position). If the pulse width is less than 1.5ms (set to 1ms in this case), it will rotate the shaft 90 degrees clockwise; if the pulse width is greater than 1.5ms (set to 2ms in this case), it will rotate the shaft 90 degrees counterclockwise; set a buffer between each pulse (set to 20ms in this case, the speed is controlled by the buffer time).
DC servo motor control principle
Servo motors are basically brushed DC motors with some form of position feedback control connected to the rotor shaft. They are connected to and controlled by PWM type controllers and are mainly used in position control systems and radio control models.
DC motor switching and control small DC motors can be "switched on" or "switched off" by switches, relays, transistors or MOSFET circuits, the simplest form of motor control is "linear " control. This type of circuit uses a bipolar transistor as a switch (or a Darlington transistor if a higher current rating is required) to control the motor from a single power source.
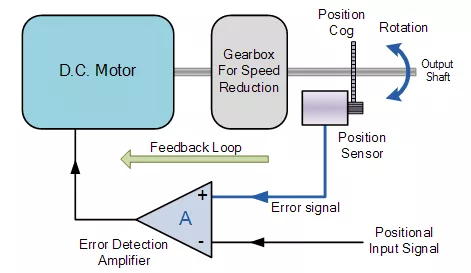
An error detection amplifier looks at this input signal and compares it to the feedback signal from the motor output shaft to determine if the motor output shaft is in error, and if so, the controller makes the appropriate correction to accelerate or decelerate the motor it down. This response to a position feedback device means that the servo motor operates within a "closed loop system".
The speed of the servo motor can be controlled by varying the amount of base current flowing into the transistor, for example, if the transistor is "halfway" on, only half of the supply voltage will flow to the motor. If the transistor is "fully on" (saturated), all of the supply voltage flows to the motor and it spins faster.
If you work with AC motor, you can control the steering of the drive shaft and its speed with the help of phase shift and frequency variation; or with the help of a signal generator, corresponding to the variation of the PWM signal output at different frequencies, and then control the motor according to the above principle.
This is all about servo motor control principle. Besides, there are related product such as AC servo motor drive in ATO, please click or contact us if you are interested.
