Types of Hydraulic Motors
Hydraulic motors are rotary actuators that convert hydraulic pressure supplied by the hydraulic pump into mechanical energy (such as torque and speed) applied to its output shaft. In terms of energy conversion, hydraulic pumps are interchangeable with hydraulic motors when pouring fluid into a hydraulic pump of any kind thus enabling the pump to work as a motor or when the main shaft of a hydraulic motor rotates driven by external torque thus working as a pump. This interchangeability between hydraulic motors and pumps is attributed to the same basic structural elements they share, that is, enclosed space that varies periodically in size and a compatible oil distribution mechanism.

Hydraulic motors can be classified in different ways. Based on different rated revolving speed, there are high-speed and low-speed motors. And in terms of configuration, there are mainly four types of hydraulic motors among others, namely, gear motors, vane motors, radial plunger motors and axial plunger motors. ATO's hydraulic pump motors varies in speed and output power.
In terms of revolving speed:
High-speed Hydraulic Motors
This kind of motors boast of 500 rpm and above in output speed. Apart from this, it’s featured with low rotational inertia, fast start-up and brake, immediately-responded speed regulation and commutation. In general, the output torque produced by high-speed hydraulic motors is not quite high.
Low-speed Hydraulic Motors
This type of motors provides an output speed lower than 500 rpm characterized by large displacement, large size and low revolving speed, and consequently it can be connected directly to the transmission mechanism without the support of speed reducers, thus streamlining the whole mechanism.
In terms of configuration:
Gear motors
Gear motors are adapted to negative and positive rotation thanks to a balanced design where the inlet and outlet ports of the motor are equal in size and the internal structure is symmetrical. And the motor has a separate oil drainage port to clean out the leakage at the bearings. The device employs rolling bearings to reduce friction torque upon start-up. The gear hydraulic motor has more teeth than its pump for torque ripple reduction. Gear motors have the advantages of small size, light weight, good oil suction capacity, convenient maintenance, impact resistance and low inertia. But on the other hand, gear motors have some shortcomings such as large pressure and torque ripple, low volumetric efficiency and input pressure, low starting torque (only 60%-70% of rated torque), high noise, and poor stability at low speed. Therefore, gear motors are only applicable under high-speed and small-torque condition. It’s generally suitable with agricultural machinery and other mechanical equipment that does not demand much in torque uniformity.
Vane motors
Vane hydraulic motors has many virtues including small size, balanced flow, low moment of inertia, stable operation, low noise, good flexibility and high input speed, competent in dealing with high commutation frequency.
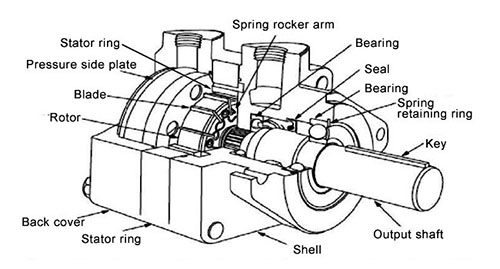
But it has large leakage with low input pressure and works unstably at low speed, and its anti-pollution capability is not that good as gear motors. Therefore, vane motors generally satisfy demands of high speed, low torque and sensitive motion.
Radial plunger motors
The radial plunger motor is a type of low-speed and high-torque hydraulic motor. According to the number of actions per revolution, there are single-acting hydraulic motors and multi-acting hydraulic motors.
- Single-acting connecting rod radial plunger motors
The motor is composed of housing, crankshaft, flow distributing valve, connecting rod, plunger, eccentric wheel and other parts.
Advantages: simple structure, reliable performance, large output torque, high pressure resistance.
Disadvantages: large size, heavy weight, large torque ripple, poor stability at low speed.
- Multi-acting internal curved radial plunger motors
The displacement of this type of motor is doubled compared to the single-acting motor, equivalent to that provided by a single-acting motor with another 21 plungers installed. Under the same working pressure, the increasing number of plungers brings about larger output torque as well as lower torque ripple rate. Therefore, the motor of this type can be developed into a multi-row plunger motor with a large displacement, and can run smoothly at a very low speed.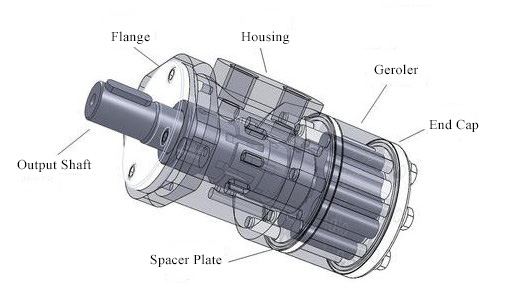
Advantages: small size, light weight, acclaimed reliability, large output torque, high pressure resistance.
Disadvantages: complex structure difficult and costly for manufacturing.
Axial plunger motors
The working principle of axial plunger motors is that the oil distribution plate and the swash plate are kept in their original place, while the motor shaft rotates together with the cylinder connected to it. When the pressure oil enters the cylinder’s plunger hole through the window of the oil distribution plate, the plunger extends out driven by the pressure oil and closely sticks to the swash plate, following which, the swash plate produces a reactive force against the plunger, which can be split into an axial force and a vertical force Q. Q is balanced with the hydraulic pressure on the plunger, and Q enables the plunger to generate a torque against the center of the cylinder, driving the motor shaft in negative rotation. The instantaneous total torque generated by the axial plunger motor is pulsating. If the input direction of pressure oil is shifted, the motor shaft will move in positive rotation. Changes in dip angle of the swash plate, namely, the variations of displacement affect not only the motor’s torque, but also its speed and rotary direction. The greater the dip angle, the greater the torque produced and the lower the speed.
Buy 500W 12V, 800W 12V, 2 hp 12V, 3 hp 24V hydraulic pump motor to meet your specific needs right now!
