Selecting the Right Type of Stepper Linear Actuator
Generally speaking, one of the commonly used methods to achieve precise linear positioning is to make a set of linear positioning system by pairing the motor with the sliding bar. Here we will discuss several different ways to create a linear actuator by using the sliding bar and stepper motor. The stepper motor is the most commonly used selection in the application of motor control because if the operation is correct, it is an economic solution that can achieve accurate positioning without the need of position feedback.
Stepper linear actuator can be divided into three types, external shaft type, non-captive shaft type and captive type.
External shaft stepper linear actuator
The structure directly uses lead screw as the motor shaft. The nut on the screw must limit rotation to achieve linear motion. This type of stepper linear actuator is usually called external shaft type stepper motor linear actuator.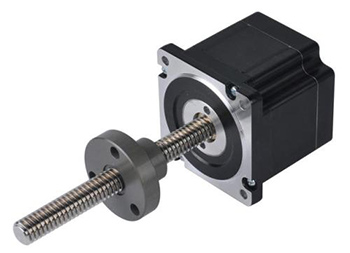
Stroke is an important factor to be taken into consideration. In the linear sliding system of the 60~500mm stroke, the external shaft stepper linear actuator is generally selected. In this case, the linear slider and the nut are connected to prevent the rotation of the nut while supporting the load so as to ensure that the nut is not affected by the potential lateral force.
Long rod really brings some risks. The biggest risk is that the actuator and leadscrew will resonate in some positions of the stroke, which will not affect the performance but will cause obvious noises. In some extreme cases, the noise or vibration is large enough to cause the motor to lose the step and lead to the position deviation. Subdivision, setting up acceleration and deceleration and other driving technologies can reduce noise. At the same time, the design of the screw end and bearing support is also helpful to reduce the noise.
Non-captive shaft stepper linear actuator
The nut is built in the motor, and the lead screw can pass through the motor to have linear motion. The screw rotation should be restricted to produce linear motion in the design. This type of motor is non-captive shaft stepper linear actuator.
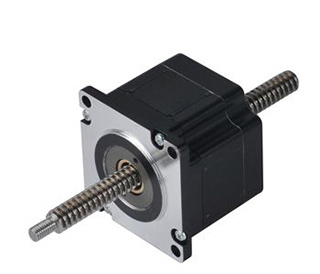 Generally, the application stroke of non-captive shaft stepper motor linear actuator is usually 30-200mm. Compared with external shaft motor, the advantage of non-captive shaft linear actuator is to allow greater installation coaxality error. If the lead screw and nut of linear module and the lead rail parallelism are not good, it will cause the system problem. Although the nut allows a certain clearance diametral, it is not enough for the whole module. The nut clearance diametral of the non-captive shaft stepper linear actuator allows the tilting degree of lead screw within 1 degrees and can tolerate more systematic error.
Generally, the application stroke of non-captive shaft stepper motor linear actuator is usually 30-200mm. Compared with external shaft motor, the advantage of non-captive shaft linear actuator is to allow greater installation coaxality error. If the lead screw and nut of linear module and the lead rail parallelism are not good, it will cause the system problem. Although the nut allows a certain clearance diametral, it is not enough for the whole module. The nut clearance diametral of the non-captive shaft stepper linear actuator allows the tilting degree of lead screw within 1 degrees and can tolerate more systematic error.
The characteristics non-captive shaft stepper linear actuator is to use the motor as the sliding part to connect the motor with lead rail slider with both ends of the guide screw fixed. One advantage of this type of motor is that the lead screw does not rotate, so there is no limit of the critical speed. Another advantage is that multiple motors can be installed on the same lead screw, and the motor cannot "pass" each other, but its motion is independent of each other.
Captive stepper linear actuator
The third type of motor can be used in some applications of mechanical devices in which nuts or screws are not available. This type of motor is the same as non-captive shaft actuator which has built-in nut. The screw shaft is connected with the spline shaft, and the spline and the spline housing at the front end of the motor coordinate with each other to prevent the rotation, thus realizing the linear motion of the stepper actuator. This type of motor is called captive stepper linear actuator.
 In the application of short stroke requirement, for example, in the occasion where the spline device cannot be provided with the stroke less than 50mm, it is suggested to use captive stepper linear actuator. The advantage of this type of motor is compact structure, which needs no spline mechanical devices. The spline housing at the front end of motor is made of mould, can not bear the large lateral force. The main function of the design is to restrict the rotation of the screw relative to the motor.
In the application of short stroke requirement, for example, in the occasion where the spline device cannot be provided with the stroke less than 50mm, it is suggested to use captive stepper linear actuator. The advantage of this type of motor is compact structure, which needs no spline mechanical devices. The spline housing at the front end of motor is made of mould, can not bear the large lateral force. The main function of the design is to restrict the rotation of the screw relative to the motor.
ATO offers external shaft type and non-captive shaft type two versions of the stepper linear actuators, they come in Nema 11, Nema 14, Nema 17, Nema 23 four size.
