VFD for overhead crane
I. Overview
The overhead crane is a kind of hoisting machinery with quite extensive application in the industrial and mining enterprise. Its operating organism is constituted by three basically independent dragging systems, which are respectively the cart dragging system, dolly dragging system and hook dragging system. This article ATO will take the practical application of VFD for overhead crane improvement in thermal power plant as the example, illustrating the application and improvement scheme of VFD for the overhead crane comprehensively.
Comparison of the control system
- Compare the speed regulating mode of the overhead crane
Serial rotor resistance start-the traditional serial resistance type speed regulating. This case adopts the serial resistance type speed regulating before transformation. It has big consumption and low efficiency. It occupies a high percentage in the present speed regulating system of the overhead crane. However, it is gradually replaced by the frequency conversion speed regulating mode.
It occupies a high percentage in the present speed regulating system of the overhead crane. However, it is gradually replaced by the frequency conversion speed regulating mode. - VFD speed regulating: Low consumption and high efficiency. At present, the new overhead crane regulating usually adopts the frequency conversion speed regulating mean. Some old overhead cranes are gradually transformed with the VFD.
The characteristics of applying the VFD on the overhead crane:
- High positioning precision
- Good vibration-proof performance
- Smooth and stable acceleration and deceleration
II. Combining the VFD and PLC control system with the overhead crane application system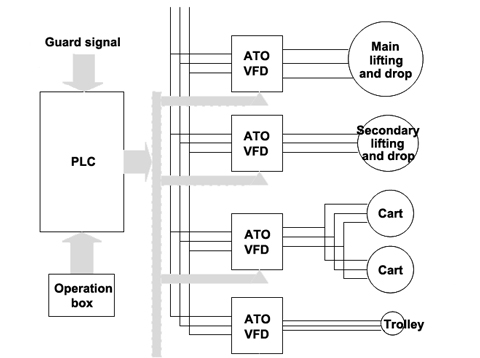
III. Model selection and functional introduction of the VFD
ATO selects the high-performance vector VFD for the overhead crane, to satisfy various functions of the overhead crane.
1. Model selection of the VFD
- Main lifting and drop (34kW induction motor), select 60hp VFD.
- Secondary lift and drop/open and close (34kW induction motor), select 60hp VFD.
- Cart (double 11kW induction motors), choose 40hp VFD.
- Trolley (7.5kW induction motor), choose 15hp VFD.
2. The function of the VFD on the overhead crane
- Self-learning function (the VFD has static and dynamic self-learning functions)
- Braking function (verify FDT function and regulate the torque parameters in hook slipping)
- Hover function
- Precise position control function
- Quick stop function (the main and secondary upgrading VFD are equipped with the braking units. The field acceleration and deceleration time are as short as 1.3S)
- Fault display: Fault reset function
IV. System debugging
1. Cart dragging system: Positive and negative revolving of the cart, the multi-stage speed function on the VFD is used to realize the speed level control.
Parameters of ATO VFD for the cart:
| Function code | Parameter setting | Instruction |
| P0.00 | 5 | Multi-stage speed setting |
| P0.02 | 1 | Terminal operating command |
| P0.03 | 30 | Operating frequency (speed of the first stage) |
| P0.10 | 8 | Acceleration time 1 |
| P0.11 | 8 | Deceleration time 1 |
| P3.06 | 8 | Acceleration time 2 |
| P3.07 | 8 | Deceleration time 2 |
| P3.08 | 60 | Speed of the first stage (30Hz) |
| P3.09 | 90 | Speed of the second stage (30Hz) |
| P6.00 | 1 | Definition of forward revolving of X1 terminal |
| P6.01 | 2 | Definition of reverse revolving of X3 terminal |
| P6.02 | 12 | Definition of X3 multi-stage speed terminal 1 |
| P6.03 | 7 | X4 terminal fault reset definition |
| P6.12 | 4 | Frequency level detection of FDT output |
| P6.13 | 3 | Fault output |
| P6.19 | 5 | FDT electrical inspection value |
| P6.20 | 0 | FDT lag monitoring value |
2. Trolley dragging system: Positive and negative revolving of the trolley, the multi-stage speed function on the VFD is used to realize the speed level control.
Parameters of ATO VFD for the trolley:
| Function code | Parameter setting | Instruction |
| P0.00 | 5 | Multi-stage speed setting |
| P0.02 | 1 | Terminal operating command |
| P0.03 | 30 | Operating frequency (speed of the first stage) |
| P0.10 | 5 | Acceleration time 1 |
| P0.11 | 5 | Deceleration time 1 |
| P3.06 | 5 | Acceleration time 2 |
| P3.07 | 5 | Deceleration time 2 |
| P3.08 | 60 | Speed of the first stage (30HZ) |
| P3.09 | 90 | Speed of the second stage (30HZ) |
| P6.00 | 1 | Definition of the positive revolving of X1 terminal |
| P6.01 | 2 | Definition of the negative revolving of X3 terminal |
| P6.02 | 12 | Definition of X3 multi-stage speed terminal 1 |
| P6.03 | 7 | X4 terminal fault reset definition |
| P6.12 | 4 | Frequency level detection of FDT output |
| P6.13 | 3 | Fault output |
| P6.19 | 5 | FDT electrical inspection value |
| P6.20 | 0 | FDT lag monitoring value |
Parameters of the main lifting and drop VFD:
| Function code | Parameter setting | Instruction |
| P0.00 | 1 | Keyboard operation frequency setting |
| P0.02 | 1 | Terminal operation command |
| P0.03 | 45 | Operating frequency |
| P0.10 | 1.3 | Acceleration time |
| P0.11 | 1.3 | Deceleration time |
| P0.15 | 15 | Torque lift |
| P0.16 | 50 | Cut-off frequency of torque lift |
| P6.00 | 1 | Definition of the positive revolving of X1 terminal |
| P6.01 | 2 | Definition of the negative revolving of X3 terminal |
| P6.02 | 00 | X3 reserved terminal |
| P6.03 | 7 | X4 terminal fault reset definition |
| P6.12 | 4 | Frequency level detection of FDT output |
| P6.13 | 3 | Fault output |
| P6.19 | 10 | FDT electrical inspection value |
| P6.20 | 0 | FDT lag monitoring value |
Parameters of the secondary lifting and drop VFD (open and close):
| Function code | Parameter setting | Instruction |
| P0.00 | 1 | Keyboard operation frequency setting |
| P0.02 | 1 | Terminal operation command |
| P0.03 | 45 | Operating frequency |
| P0.10 | 1.3 | Acceleration time |
| P0.11 | 1.3 | Deceleration time |
| P0.15 | 15 | Torque lift |
| P0.16 | 50 | Cut-off frequency of torque lift |
| P6.00 | 1 | Definition of the positive revolving of X1 terminal |
| P6.01 | 2 | Definition of the negative revolving of X3 terminal |
| P6.02 | 00 | X3 reserved terminal |
| P6.03 | 7 | X4 terminal fault reset definition |
V. Matters needing attention of applying ATO VFD on the overhead crane
- The overhead crane system belongs to be the heavy load system. Especially the main/secondary lifting system has relatively big current in starting and braking. Therefore, in model selection of the VFD, the operator must choose the corresponding power section of the VFD according to the maximum current in practical operating. Furthermore, margins should be left.
- The VFD has hooked slipping or unstable hover condition. The operator must verify the band-type brake and torque lift of the FDT signal control according to the field load and the hook slipping range, until satisfying the technological requirements thoroughly.
- Because of the inertia and fast response requirement of the overhead crane system, the VFD must be equipped with a braking unit and a braking resistance. In selecting the braking resistance, while considering the power of the motor and the VFD, the field inertia and braking time are more important to be considered. The braking resistance power of the main/secondary lifting system must also increase the configuration accordingly.
- In transforming the overhead crane, the cart system needs to drag two motors. The direction of the motors must be paid special attentions.
Buying ATO VFDs for overhead crane improvement now, 15hp VFD, 40hp VFD, 75hp VFD...
