Troubles with the induction motors are generally divided into two categories. One is the electrical faults, such as the various faults of switches, buttons, fuses, electric brushes, stator winding, rotor, starting equipment and so on. The other is the mechanical problems, such as the problems of the bearing, fan blade, motor frame, coupling, end bell, bearing cover, spindle and so on.
Once the induction motor has any problem, there might be some abnormal phenomena, for instance, the rising temperature, over current, vibration and abnormal noise and so on. Therefore, learn about these phenomena, find out the cause, and then troubleshoot it. The following is some common faults and troubleshooting method of three-phase induction motors for your reference.
Blog
Switching power supply (SMPS) is widely used due to its compact size, light weight and high efficiency. But it has its own disadvantage of producing noises, which not only affect the normal operation of the circuit, but also interfere with the neighboring electronic equipment. So how to reduce the noise of SMPS? First of all, we need know where the noise comes from, and then we can eliminate it accordingly.
The noise of switching power supply can be divided into two major categories: one is the interference formed by the internal components of SMPS, and the other is the interference caused by the external factors. There are many sources of noise, such as external interference like lightning, mechanical vibration, poor contact and so on. Besides, improper design of circuit, improper parameter selection of components, unreasonable layout and wiring will also increase the power supply noise.
How to control the speed of three phase induction motor? The speed control method includes: changing the number of poles, stator voltage control, stator frequency conversion, cascade speed control, double-feed speed regulation, hydraulic coupler, electromagnetic slip clutch, etc.
The actual speed of three phase asynchronous motor is given by n=ns (1 - s) =120f /p (1-s). It can be seen from the formula that the speed of 3 phase induction motor can be changed by the means of changing the number of induction motor’s poles "p", the slip "s" and the frequency of power supply"f".
Circuit breakers and fuses can protect the electric equipment and lines from short circuit. Actually, both have their own characteristics. Circuit breakers are used to switch on and off the load circuit as well as cut off the fault circuit, so as to ensure the safety. The fuse is used as a protector by melting itself when the current is too high or exceeds the load current. It is completely different from the circuit breaker on the breaking current. Its function can be easily understood by the commonly used fuse in our home.
A brushless DC (BLDC) motor is highly reliable since it does not have any brushes to wear out and replace, brushless design for high speeds, long life and high power density. ATO has a wide selection of high quality and good performance brushless DC motors to meet your specific needs. They come in different size to provide you the right torque for your application. The price of our brushless DC motors listed in the form are reasonable and for reference only. If you want more information, please go to ATO brushless DC motors products page.
Stepper motor is an actuator that transforms the digital pulse signal into angular displacement. Namely, when stepper drive receives a pulse signal, it drives the stepper motor to rotate at a fixed angle (i.e. step angle) in the set direction. Stepper motor is a main executive component in the modern digital control system, and has a very wide range of applications because of the following advantages:
- Precise position control, as confirm the shaft rotation angle in accordance with the number of input pulses.
- Wide speed range, because the speed is proportional to the pulse frequency.
- Excellent starting and stopping as well as reverse response.
- Able to synchronously rotate at an extremely low speed just directly connecting the load to the motor shaft.
- Long service life. Unlike DC motors, stepper motors don’t need to adjust phase position by the brush and commutator, thus reducing the friction and increasing the service life.
A power line filter, also called EMI power line filter, is a filter circuit composed of capacitors, inductors and resistors. It is a passive bi-directional network, one end of which is connected with the power supply and the other end is the load. The power line filter works based on the principle of impedance matching network: the bigger the impedance matching between the input and output of power line filter and the load is, the more effective the attenuation of electromagnetic interference is.
ATO power line filters are characterized with excellent differential mode and common mode attenuation performance to suppress EMI or RFI, which provide an electromagnetic shielding for your equipment or device.
How does an 3-phase induction motor work? In short, it works based on the principle of electromagnetic induction. When the stator windings are supplied with three-phase alternating current, a rotating magnetic field is generated between the stator and the rotor. The rotating magnetic field cuts the rotor windings to generate induced electromotive force and current in the rotor circuit. The current in the rotor conductor forces the rotor to rotate under the effect of the rotating magnetic field. Below, let’s specifically analyze the generation of rotating magnetic field, its direction and speed as well as slip.
The starting methods of three phase induction motor generally are direct-on-line starting, reduced-voltage starting and soft starter.
Direct-on-line starting is the most basic and simplest in the motor starting. The method is characterized by less investment, simple equipment and small quantity. Although the starting time is short, the torque is smaller at starting and the current is large, which is suitable for starting small capacity motors.
Induction motor, also known as asynchronous motor, is a kind of AC electric motor. According to the different power phase, it can be divided into single-phase and three-phase. The main construction of induction motor is composed of two parts - stator and rotor. In addition, there are end bells, bearings, motor frame and other components. The following will give more details about the structure of three-phase induction motor or asynchronous motor.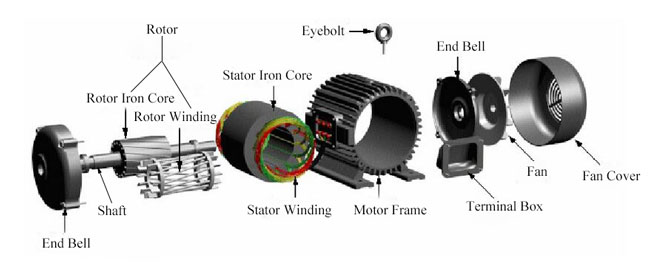
The opening area needs to be set when constantly sending in and out parts on a dangerous high-speed operation machine. If a protective door is set here, it will seriously affect the production and certainly not be able to take both production and safety into account. Safety light curtain is a safety device set in these openings, and it realizes safety protection through the light beams. It is a type of sensor that install through beam photoelectric sensors in rows from top to bottom. It monitors a certain range of amplitude, when the machine is running, it intercepts the light when a human body intrudes, and stops the machine to achieve the purpose of protecting personal safety. However, when processed parts are fed in and out through the light curtain, they do not cause the machine to stop working. In this way, the operators are effectively protected from harm without affecting the production at the same time.
AC motors are divided into two types, synchronous motors and asynchronous motors which are also called induction motors. The biggest difference between synchronous motors and asynchronous motors (induction motors) is whether the speed of rotor is consistent with the speed of the rotating magnetic field in the stator. If the rotor’s rotation speed and the stator’s field speed are the same, it is called synchronous motor; if not, it is asynchronous motor. Furthermore, there are big differences specific to the performance parameters and applications between the two.
Magnetostrictive sensor indicates a kind of displacement detecting device developed based on ferromagnetic material magnetostrictive effect. It could be used for continuously, precisely and real-time detecting the displacement (position) and velocity of various moving parts under abominably industrial environment. As an important component to realize precise operation and control, it can substantially enhance the precision and efficiency of the whole system. It is applicable for detecting the stroke or position of mechanical device with rectilinear motion. Precision servo feedback control of hydraulic system is one of the most typical applications.
In hydraulic variable propeller pitch system, linear displacement sensor which measuring hydraulic oil cylinder piston stroke plays an important role, while magnetostrictive sensor becomes the best among all stroke measuring displacement sensors in different industry, relying on its measuring accuracy, reliability, environment adaptation etc. Magnetostrictive displacement sensors are widely used in wind power generation field.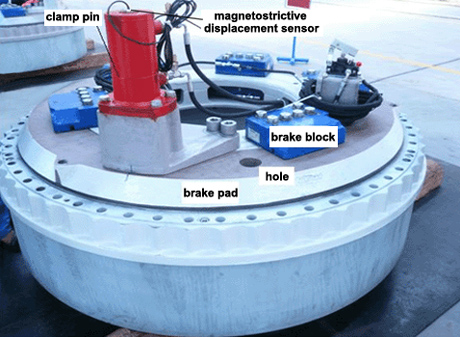
Why buy an isolation transformer from ATO?
ATO isolation transformers have the special advantages as follows:
- High quality in lower price, manufactured direct sale.
- They can work as step-up transformers or step-down transformers and voltage less than 1000V.
- Isolation transformers with a NEMA 3R enclosure, suitable for both indoor and outdoor applications.
- Voltage convert: Single phase to single phase, three phase to three phase, or three phase to single phase.
- Transformers have a minimum 2 year warranty, long life span and high efficiency.
Switching power supply (SMPS) modulates pulses of input voltage by closing and opening the circuit of electronic switching devices (such as transistor, field-effect transistor, and silicon controlled thyratron) to fulfill output voltage adjustment, automatic voltage stabilization, and continuous voltage conversion between DC/AC or DC/DC. Switching power supply is mainly divided in two types, DC SMPS and AC SMPS. Switching power supply is composed of main circuit, control circuit, detection circuit, and auxiliary power supply. Now it is widely applied to all kinds of electronic devices due to its small size, light weight and high efficiency.
ATO switching power supplies can convert full range of AC input to DC with protection of short circuit, overload and overvoltage, complying with safety & EMC standards. Besides, they are high reliability and long lifespan with favorable price.
How does an electromagnetic relay work? Electromagnetic relay uses electromagnet to control “on” or “off” status of the operating circuit. Electromagnetic relay consists of electromagnet, armature, spring, movable contact and stationary contact. When placing voltage to both ends of a coil, the coil will be flowed with current and generate electromagnetic effect.
The correct installation, use and maintenance of the planetary speed reducer & gearbox are important parts of guaranteeing the normal operation of the machine and equipment. How to install the motor to the planetary gearbox properly? Here are some tips for your reference.
In the family of gearboxes, the planetary speed reducer or gearbox is widely used in transmission systems such as servo motors, stepper motors and DC motors due to its small size, high efficiency, wide deceleration range and high precision. In the premise of ensuring the precision transmission, it is mainly used to reduce the speed, increase torque and reduce the inertia ratio of the loads or motors. Thus, how to choose a right planetary speed reducer or gearbox to fit a motor?
The planetary speed reducer or gearbox is a kind of transmission mechanism. It utilizes the speed transducer of the gearbox to reduce the turnover number of the motor to the required one and obtain a big torque. How does a planetary gearbox work? We can learn more about it from the structure. The main transmission structure of the planetary gearbox is planet gears, sun gear and ring gear.
